Actionneur électrique d’embrayage : dossier technique
Télécharger le sommaire du dossier (pdf, 150 ko)
- Vidéo de mise en situation et de présentation
- Modèles numériques : actionneur Sachs (Citroën C3, actionneur Valéo Lancia)
- Mises en plan, éclatés, nomenclatures
- Cahier des charges : fonctions, critères, niveaux
- Courbes d’essai de l’embrayage : effort de commande, effort normal sur le disque
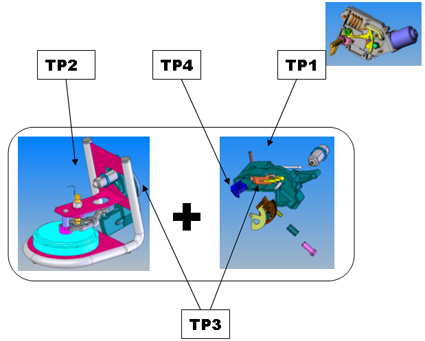
- Dossier pédagogique :
- TP1 : analyse comparative des solutions techniques mise en œuvre sur les deux actionneurs, modélisation cinématique.
- TP2 : simulation de comportement des deux actionneurs, validation par mesure électrique du couple et de la vitesse sur l’actionneur Citroën, prédétermination du moteur électrique.
- TP3 : étude de fonctionnement de la bielle compensatrice. Etude du coincement et des pressions de contact. Choix d’une géométrie et d’un matériau pour le coin.
- TP4 : étude de la relation produit matériau procédé sur le levier : recherche du couple procédé matériaux à partir d’une base de données. Validation du choix par simulation.
- Dossier ressources :
- Note d’utilisation de la maquette didactique + boîtier d’alimentation
- Documents de guidance Méca3D et MotionWorks
- Calcul de prédétermination d’un moteur électrique
- Documents de guidance CES4
- Documents de guidance Cadmould rapid + banque d’images copie d’écran
- Dossier complémentaire ( professeur ) :
- TD1 : conception du dispositif de rattrapage d’usure sur l’actionneur Valéo
- TD2 : définition du secteur denté
- TD3 : calcul du couple transmissible par l’embrayage
- TD4 : découverte du procédé d’obtention de la fourchette, choix du matériau constitutif
- Eléments de corrigé des TP1, TP2, TP3 et TP4
- Matériel mis en œuvre :
- Maquette didactique + boîtier de commande et de mesure
- Actionneur démonté pour analyse et manipulations
- 2 alimentations électriques boîtier et moteur ( équipement du labo de méca )
- Oscilloscope à mémoire 2 voies ( équipement du labo de méca )
Stratégie envisagée :
4 TP avec des centres d’intérêts différents en parallèle sur le système.